
AI黑化如恶魔附体!LARGO攻心三步,潜意识种子瞬间开花 | NeurIPS 2025
AI黑化如恶魔附体!LARGO攻心三步,潜意识种子瞬间开花 | NeurIPS 2025看似无害的「废话」,也能让AI越狱?在NeurIPS 2025,哥大与罗格斯提出LARGO:不改你的提问,直接在模型「潜意识」动手脚,让它生成一段温和自然的文本后缀,却能绕过安全防护,输出本不该说的话。
来自主题: AI技术研报
7350 点击 2025-10-27 09:40
 搜索
搜索
看似无害的「废话」,也能让AI越狱?在NeurIPS 2025,哥大与罗格斯提出LARGO:不改你的提问,直接在模型「潜意识」动手脚,让它生成一段温和自然的文本后缀,却能绕过安全防护,输出本不该说的话。
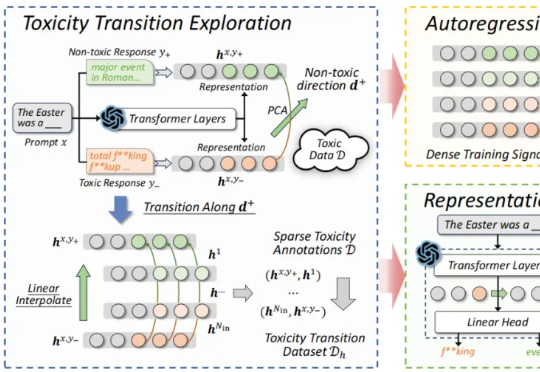
近期,来自北航等机构的研究提出了一种新的解决思路:自回归奖励引导表征编辑(ARGRE)框架。该方法首次在 LLM 的潜在表征空间中可视化了毒性从高到低的连续变化路径,实现了在测试阶段进行高效「解毒」。

今年,流匹配无疑是机器人学习领域的大热门:作为扩散模型的一种优雅的变体,流匹配凭借简单、好用的特点,成为了机器人底层操作策略的主流手段,并被广泛应用于先进的 VLA 模型之中 —— 无论是 Physical Intelligence 的 ,LeRobot 的 SmolVLA, 英伟达的 GR00T 和近期清华大学发布的 RDT2。

多模态大模型首次实现像素级推理,指代、分割、推理三大任务一网打尽!
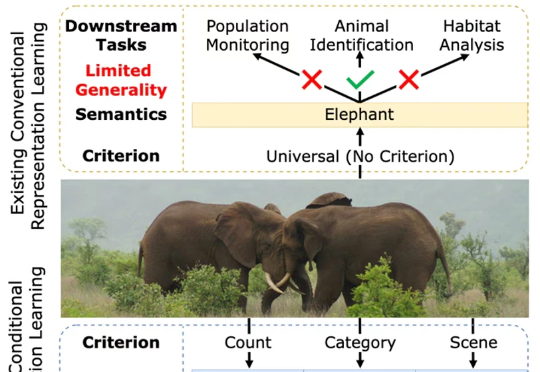
一张图片包含的信息是多维的。例如下面的图 1,我们至少可以得到三个层面的信息:主体是大象,数量有两头,环境是热带稀树草原(savanna)。然而,如果由传统的表征学习方法来处理这张图片,比方说就将其送入一个在 ImageNet 上训练好的 ResNet 或者 Vision Transformer,往往得到的表征只会体现其主体信息,也就是会简单地将该图片归为大象这一类别。这显然是不合理的。
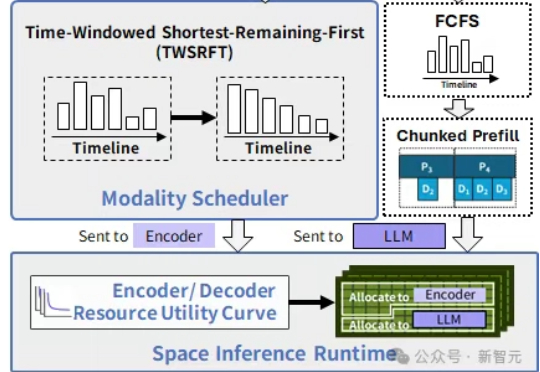
在中国科学院计算技术研究所入选NeurIPS 2025的新论文中,提出了SpaceServe的突破性架构,首次将LLM推理中的P/D分离扩展至多模态场景,通过EPD三阶解耦与「空分复用」,系统性地解决了MLLM推理中的行头阻塞难题。
近年来,NeRF、SDF 与 3D Gaussian Splatting 等方法大放异彩,让 AI 能从图像中恢复出三维世界。但随着相关技术路线的发展与完善,瓶颈问题也随之浮现:
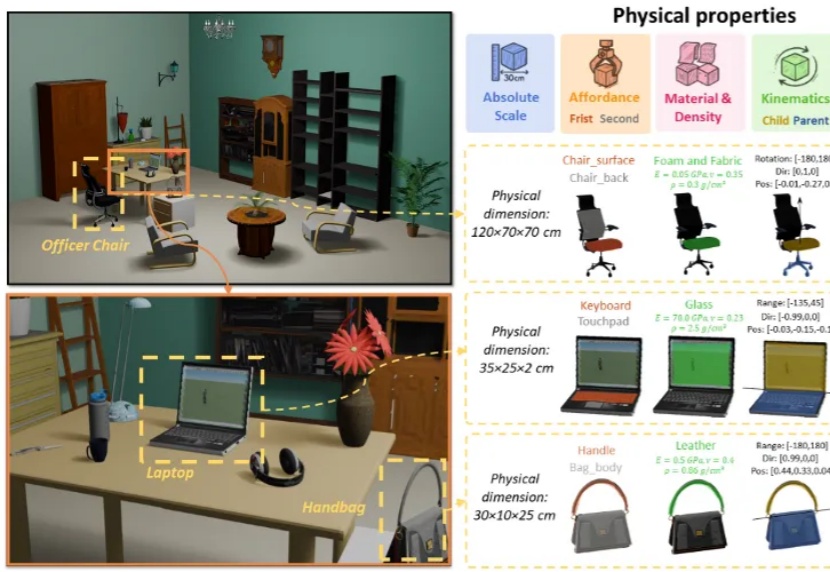
3D 生成正从纯虚拟走向物理真实,现有的 3D 生成方法主要侧重于几何结构与纹理信息,而忽略了基于物理属性的建模。
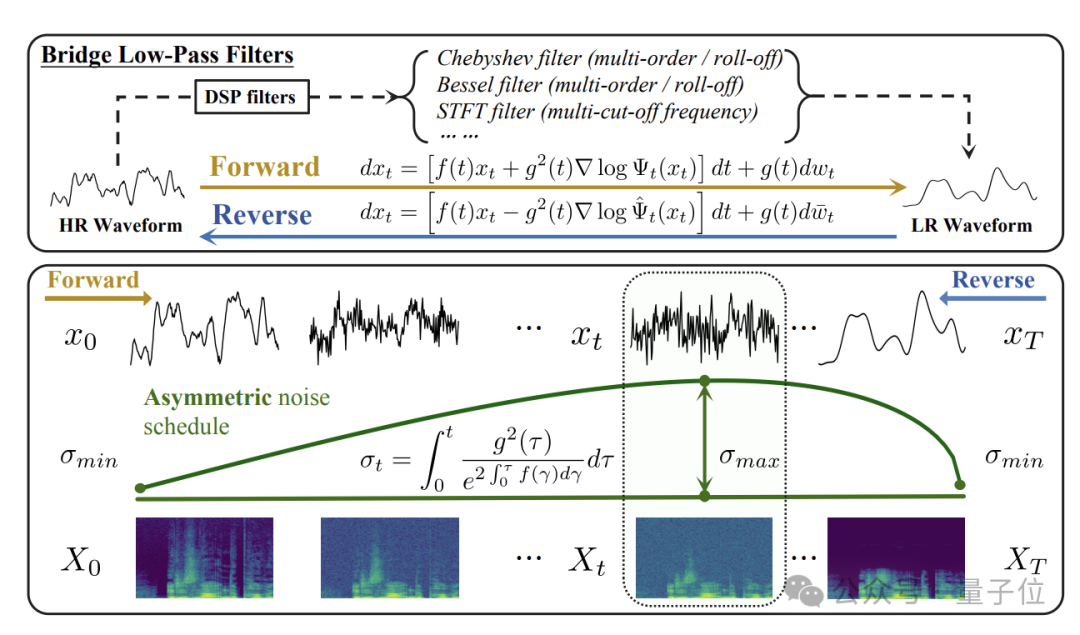
在这一背景下,清华大学与生数科技(Shengshu AI)团队围绕桥类生成模型与音频超分任务展开系统研究,先后在语音领域顶级会议ICASSP 2025和机器学习顶级会议NeurIPS 2025发表了两项连续成果:
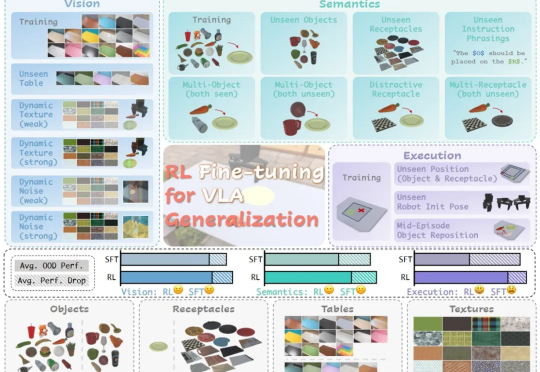
在具身智能领域,视觉 - 语言 - 动作(VLA)大模型正展现出巨大潜力,但仍面临一个关键挑战:当前主流的有监督微调(SFT)训练方式,往往让模型在遇到新环境或任务时容易出错,难以真正做到类人般的泛化